
Cyfansoddiad
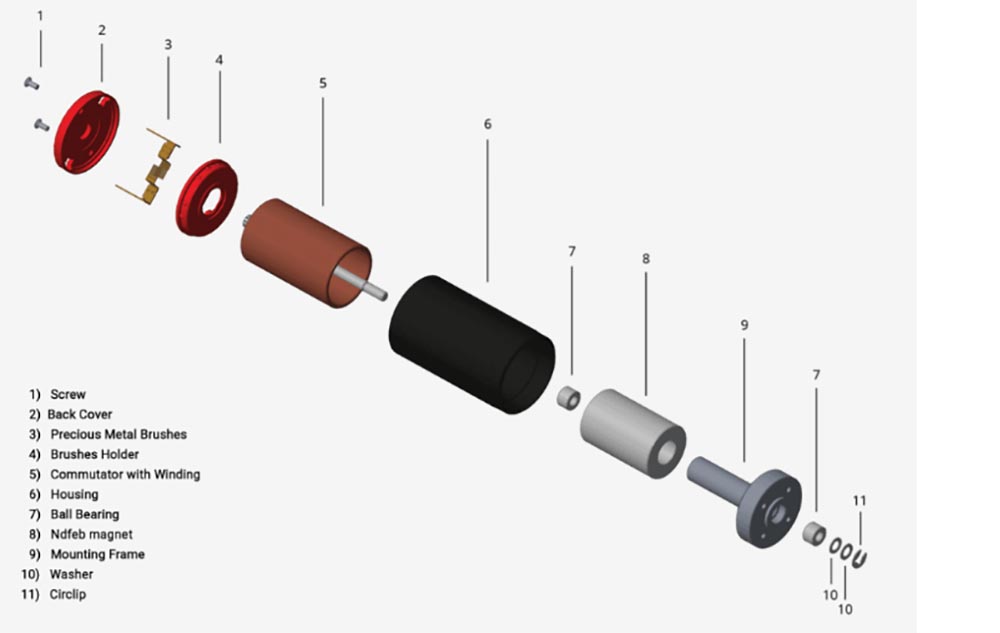
1. Modur DC magnet parhaol:
Mae'n cynnwys polion stator, rotorau, brwsys, casinau, ac ati.
Mae polion y stator wedi'u gwneud o fagnetau parhaol (dur magnet parhaol), wedi'u gwneud o ferrite, alnico, haearn neodymiwm boron a deunyddiau eraill. Yn ôl ei ffurf strwythurol, gellir ei rannu'n sawl math megis math silindrog a math teils.
Yn gyffredinol, mae'r rotor wedi'i wneud o ddalennau dur silicon wedi'u lamineiddio, ac mae'r wifren enameled wedi'i weindio rhwng dau slot craidd y rotor (mae tri dirwyniad mewn tri slot), ac mae'r cymalau wedi'u weldio yn y drefn honno ar ddalennau metel y cymudwr.
Mae'r brwsh yn rhan ddargludol sy'n cysylltu'r cyflenwad pŵer a'r weindio rotor, ac mae ganddo ddau briodwedd o ddargludedd a gwrthsefyll gwisgo. Mae brwsys moduron magnet parhaol yn defnyddio dalennau metel un rhyw neu frwsys graffit metel, a brwsys graffit electrocemegol.
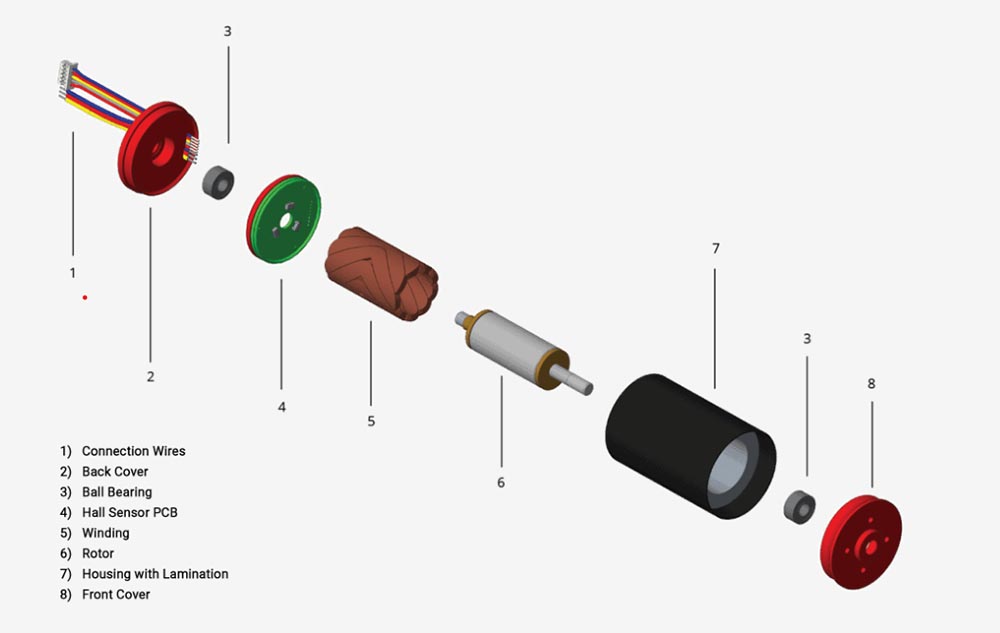
2. Modur DC di-frwsh:
Mae'n cynnwys rotor magnet parhaol, stator weindio aml-begyn, synhwyrydd safle ac yn y blaen. Nodweddir y modur DC di-frwsh gan fod yn ddi-frwsh, ac mae'n defnyddio dyfeisiau newid lled-ddargludyddion (megis elfennau Hall) i wireddu cymudo electronig, hynny yw, defnyddir dyfeisiau newid electronig i ddisodli cymudoyddion cyswllt a brwsys traddodiadol. Mae ganddo fanteision dibynadwyedd uchel, dim gwreichionen gymudo, a sŵn mecanyddol isel.
Mae'r synhwyrydd safle yn cymudo cerrynt dirwyn y stator mewn trefn benodol yn ôl newid safle'r rotor (hynny yw, yn canfod safle polyn magnetig y rotor o'i gymharu â dirwyn y stator, ac yn cynhyrchu signal synhwyro safle yn y safle penodedig, sy'n cael ei brosesu gan y gylched trosi signal ac yna'n cael ei dynnu. Rheoli'r gylched switsh pŵer, a newid y cerrynt dirwyn yn ôl perthynas resymeg benodol).

2. Modur DC di-frwsh:
Mae'n cynnwys rotor magnet parhaol, stator weindio aml-begyn, synhwyrydd safle ac yn y blaen. Nodweddir y modur DC di-frwsh gan fod yn ddi-frwsh, ac mae'n defnyddio dyfeisiau newid lled-ddargludyddion (megis elfennau Hall) i wireddu cymudo electronig, hynny yw, defnyddir dyfeisiau newid electronig i ddisodli cymudoyddion cyswllt a brwsys traddodiadol. Mae ganddo fanteision dibynadwyedd uchel, dim gwreichionen gymudo, a sŵn mecanyddol isel.
Mae'r synhwyrydd safle yn cymudo cerrynt dirwyn y stator mewn trefn benodol yn ôl newid safle'r rotor (hynny yw, yn canfod safle polyn magnetig y rotor o'i gymharu â dirwyn y stator, ac yn cynhyrchu signal synhwyro safle yn y safle penodedig, sy'n cael ei brosesu gan y gylched trosi signal ac yna'n cael ei dynnu. Rheoli'r gylched switsh pŵer, a newid y cerrynt dirwyn yn ôl perthynas resymeg benodol).
3. Modur di-frwsh magnet parhaol cyflymder uchel:
Mae'n cynnwys craidd stator, rotor dur magnetig, gêr haul, cydiwr arafu, cragen canolbwynt ac yn y blaen. Gellir gosod synhwyrydd Hall ar orchudd y modur i fesur cyflymder.
Cymhariaeth o foduron brwsio a moduron di-frwsio
Y gwahaniaeth yn yr egwyddor drydaneiddio rhwng modur brwsio a modur di-frwsio: Mae modur brwsio yn cael ei gymudo'n fecanyddol gan frwsh carbon a chymudo. Mae modur di-frwsio yn cael ei gymudo'n electronig gan reolwr yn seiliedig ar signal anwythol.
Mae egwyddor cyflenwad pŵer modur brwsio a modur di-frwsio yn wahanol, ac mae ei strwythur mewnol hefyd yn wahanol. Ar gyfer moduron canolbwynt, mae modd allbwn trorym y modur (p'un a yw'n cael ei arafu gan y mecanwaith lleihau gêr) yn wahanol, ac mae ei strwythur mecanyddol hefyd yn wahanol.
modur dc brwsio di-graidd
modur dc di-graidd di-frwsh
Amser postio: Mehefin-03-2019